 Навигация по сайту
Навигация по сайту Статьи о ремонте
Статьи о ремонте

Результаты моделирования переходных процессов в приводе дробилки ККД-1500/300 в режиме неудавшегося пуска ее под завалом
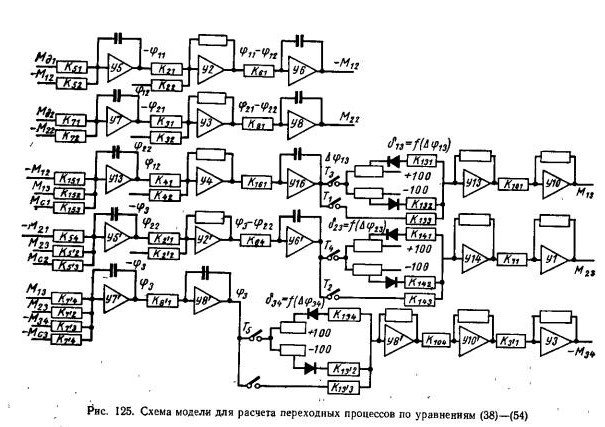
Схема набора уравнений (38)—(54) на моделирующей установке (с учетом решающих возможностей модели MH-7) представлена на рис. 125. Эта схема построена по структуре задачи. Десять интегрирующих звеньев соответственно воспроизводятся решающими усилителями У 5, 6, 7, 8, 15, 16, 5', 6', 7' и 8', три нелинейных звена зазора [функциональные зависимости (46), (49) и (52)] — усилителями 13, 14 и 13' с диодами во входной цепи, четыре суммирующих звена — усилителями 2, 3, 4, 2' и три звена перемножения — усилителями 10, 1 и 10'. Одно звено инвертора воспроизводится усилителем 3'. При включенном положении тумблеров T3, T4 и T5 моделируется работа привода с выбиранием зазоров ?1, ?2, ?3, при включенном положении тумблеров T1, T2, T3 — работа без соответствующих зазоров.
Исходные данные, принятые при моделировании за расчетные номинальные значения, таковы:

Основной целью моделирования нестационарных процессов в приводе дробилки ККД-1500/300 при неудавщемся пуске ее под завалом является определение влияния зазора между подвижным конусом и дробимым материалом (рудой) S8, зазоров в зубчатом зацеплении ?1 и ?2 и жесткости руды с34 на величину динамических нагрузок в отдельных элементах кинематической цепи. В соответствии с этим проводится широкая вариация величин ?1, ?2, ?3 и с34. Остальные параметры кинематической цепи привода дробилки остаются неизменными и равными исходным расчетным величинам.
Следует отметить, что в ходе эксплуатации дробилок изменения претерпевают обычно зазоры и жесткость руды, поскольку остальные параметры привода определены конструкцией.

Вариацию зазоров ?1, ?2 и ?3 производим в пределах 0—0,04 рад в различном их сочетании. По результатам моделирования построены графические зависимости:

Принятые здесь обозначения ?, и ? в относительных единицах имеют следующий смысл:

где М34 — крутящий момент в упругом элементе системы подвижный конус—руда—корпус;
М13 — крутящий момент в приводном валу;
Мдв.п — пусковой момент двигателя.
Графиками на рис. 126 иллюстрируется зависимость динамических нагрузок в руде ? в функции величины зазора между подвижным конусом и рудой ?3 для различных значений ?1, ?2 и с34. Сопоставление этих графических зависимостей позволяет оценить степень взаимного влияния указанных параметров на величину ?.
При изменении ?3 величина ? во многом определяется значением жесткости с34. Так, при с34 = с34 расч.н, ?1 = ?2 = 0,04 рад с увеличением ?3 нагрузки в руде достигают значений, равных 10,5. Наиболее интенсивно ? возрастает при изменении ?3 от 0 до 0,01—0,02 рад. При дальнейшем увеличении ?3 нагрузки в руде возрастают не столь значительно. При уменьшении жесткости руды в пять раз влияние зазоров ?1; ?2; ?3 на величину динамических нагрузок проявляется в меньшей степени, а ? достигает своего максимального значения, равного 4,95. Однако и в этом случае нагрузки в наибольшей степени возрастают также при изменении ?3 от 0 до 0,01—0,02 рад.
Эта особенность формирования динамических нагрузок в руде в переходных режимах пуска дробилки под завалом позволяет сделать вывод о существенном влиянии зазора ?3 на процесс первоначального страгивания подвижного конуса.
На рис. 127 приведены зависимости ? = f(?1; ?2). Их анализ показывает, что величина ? в большой мере определяется значениями зазоров ?1 и ?2. Во всем рассматриваемом диапазоне их увеличения нагрузки в руде существенно возрастают, однако, при уменьшении жесткости с34 влияние зазоров ?1 и ?2 на величину ? снижается.
Приведенные результаты моделирования показывают, что динамические нагрузки в руде при пуске дробилки под завалом могут изменяться в весьма широком диапазоне. Их максимальные значения определяются соотношением величии зазоров ?1, ?2 и ?3, а также жесткостью с34.
Зависимости ? = f(?3); ? = f(?1; ?2) даны на рис. 128 и 129. Анализ этих зависимостей показывает, что в исследуемом переходном режиме неудавшегося пуска под завалом при вариации указанных ранее параметров, динамические нагрузки в зубчатом зацеплении конических шестерен т могут принимать весьма разнообразные значения. Так, при ?1 = ?2 — 0,04 рад; ?3 = 0; с34 — 0,2 с34 расч.н; ? = 2,55; с изменением ?3 до 0,04 рад ? = 4,55.
Влияние жесткости с34 на формирование нагрузок в приводных валах определяется соотношением зазоров ?1, ?2 и ?3 в кинематической цепи привода. При их вариации в диапазоне от 0,01 до 0,04 рад при с34 = 1,c34 расч.н не наблюдается значительных изменений т. При ?1 = ?2 — 0,04 рад и с34 = 1,0 с34 расч.н и вариации ?3 от 0 до 0,04 рад, т соответственно изменяется от 3,55 до 3,9. Для с34 = 0,2 с34 расч.н при тех же значениях ?1, ?2 и ?3 величина т изменяется от 2,5 до 4,6. При ?3 = 0 влияние жесткости руды, в особенности в диапазоне изменения ?1 от 0 до 0,01 рад, незначительно.
Сопоставление этих результатов моделирования показывает, что в зубчатом зацеплении конических шестерен с эксцентриком в переходном режиме неудавшегося пуска под завалом динамические нагрузки могут изменяться в довольно широком интервале. Их величина при прочих равных условиях определяется соотношением параметров ?1, ?2, ?3 и с34.

На основании результатов моделирования можно сделать следующие выводы.
1. Неудавшийся пуск конусной дробилки крупного дробления под завалом сопровождается повышенными динамическими нагрузками в упругих элементах привода.
2. Имеющиеся в кинематической цепи привода дробилки зазоры оказывают существенное влияние на величину динамических нагрузок в дробимом материале (руде) и конической передаче.
3. Образование условного зазора 63 между подвижным конусом и рудой при определенных соотношениях параметров привода вызывает значительное увеличение динамических нагрузок в руде.
4. Величина эквивалентной жесткости системы дробящий конус — руда — корпус оказывает большое воздействие на формирование динамических нагрузок в отдельных элементах кинематической цепи привода дробилки.
Подобные новости- Некоторые вопросы математического моделирования дробилок
- Математическое описание переходных процессов в двухдвигательном приводе дробилок крупного дробления при пуске
- Расчет пусковых характеристик приводных электродвигателей дробилок крупного дробления
- Тип, мощность и пусковые характеристики приводных электродвигателей дробилок крупного дробления
- О режимах работы электропривода дробилок крупного дробления
- Дробилки с гидравлическим регулированием разгрузочной щели и гидропневматической амортизацией Уралмашзавода
- Дробилки среднего и мелкого дробления Уралмашзавода
- Дробилки вторичного крупного дробления Уралмашзавода
- Дробилки крупного дробления Уралмашзавода
- Некоторые особенности конструкции и расчета узлов дробилок среднего и мелкого дробления