 Навигация по сайту
Навигация по сайту Статьи о ремонте
Статьи о ремонте

Понятие о реологических моделях и уравнениях состояния
Все реальные тела, как было сказано ранее, обладают свойствами упругости, ползучести и пластичности. Причем пластические деформации проявляются при достижении предела пластичности материала, а ползучесть, обусловленная вязкостью тела, — при любых напряжениях.
В отличие от упругой (гуковой) среды, характерной особенностью которой является линейная зависимость между напряжениями и упругими деформациями (рис. 11), определяемая уравнениями (2.4) и (2.14), вязкость ньютоновской идеально вязкой среды определяется линейной зависимостью между напряжениями о и скоростями течения (вязкого деформирования) е:

где ev — относительная вязкая деформация; t — время; n — коэффициент вязкости (эффективная вязкость по П.А. Ребиндеру, 1958 г.).
Зависимости o—ee и o—ev смогут быть не только линейными, но и нелинейными (см. рис. 11). В последнем случае деформирование тела соответственно называется нелинейно-упругим и нелинейно-вязким.
Деформация во времени реального тела зависит от всех указанных выше свойств. Так как свойства упругости, вязкости и пластичности могут проявляться в самых различных сочетаниях, то описание деформаций реального тела часто является практически непреодолимой задачей. Поэтому, чтобы описать процесс деформирования реальных тел, рассматривают их упрощенные модели — модели идеальных тел, называемые реологическими, служащими для сравнения и изучения свойств указанных тел.
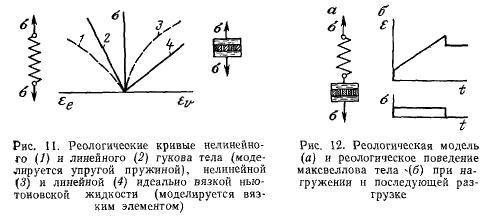
В реологических моделях гуковая идеально упругая среда моделируется упругой пружиной (см. рис. 11), а идеально вязкая ньютоновская жидкость — вязким элементом. Последний представляет собой цилиндр с просверленным поршнем, содержащим вязкую жидкость. Идеальное жесткопластическое тело Сен-Венана моделируется сухим кулоновским трением, возникающим на шероховатой поверхности при перемещении по ней груза под действием горизонтального усилия, равного пределу пластического течения оyp. При о < оур деформация жесткопластического тела равна нулю, а при о = оyp в нем развиваются неограниченные пластические деформации.
Реологическое поведение идеального тела (модели) определяется реологическим уравнением состояния, которое содержит напряжение, деформацию и их производные во времени:

Простейшими уравнениями состояния являются выражения (2.4) и (2.14). Они могут быть представлены как в дифференциальной, так и интегральной форме.
К числу простейших реологических моделей относятся модели Максвелла, Кельвина — Фохта, Пойтинга — Томсона, Гогенемзера — Прагера, Шведова — Бингама и др.
Реологическая модель максвеллова тела состоит из двух последовательно соединенных элементов — упругой пружины и вязкого элемента (рис. 12). В момент приложения постоянной нагрузки максвеллово тело деформируется упруго мгновенно, а затем, если нагрузка продолжает действовать во времени, оно испытывает медленное вязкое течение, вызванное движением перфорированного поршня в вязкой жидкости. При таком сочетании упругого и вязкого элементов в любой момент времени их напряжения будут равны, а деформации различны. Полная деформация модели определяется как сумма упругой деформации пружины еe и вязкого перемещения поршня ev:

Используя выражение (2.40) и исключив из соотношений (2.4) и (2.38) деформации еe и ev, получим известное уравнение состояния упруговязкого максвеллова тела:

где tr = n/E — время релаксации, имеющее размерность времени; n — коэффициент вязкости ньютоновской среды.
При постоянной нагрузке о = const деформация максвеллова тела определяется по следующему соотношению:

где e(t) — деформация в момент времени t; e0 — деформация в момент времени t = 0.
Деформация максвеллова тела протекает с постоянной скоростью (см. рис. 12), равной v = o/n. При постоянной деформации e = const релаксация напряжений в максвелловом теле происходит по экспоненциальному закону

При t = 0 o = o0, а при t —> 00 о —> 0.
Тело Шведова—Бингама (рис. 13) является идеальным упруговязкопластическим телом, которое оказывает сопротивление упругим деформациям элементом гукова тела, пластическому течению посредством элемента тела Сен-Венана, а вязкому течению — вязким элементом ньютоновской жидкости. Кривая зависимости о—ev тела Бингама (рис. 13, а) приведена на рис. 13, б. Уравнения состояния этого тела записываются в следующем виде:

где oyp — предел текучести; e — скорость текучести; np — коэффициент пластической вязкости (пластическая вязкость по П.А. Ребиндеру).
При а < oyр в теле Бингама возникают только упругие деформации, а когда o > oyp, тело деформируется с постоянной скоростью при постоянной пластической вязкости (np = o — oyp/v) и резком снижении эффективной вязкости (n=o/v).
Модель тела Шведова (см. рис. 13,е) несколько сложнее модели Бингама. Уравнение состояния тела Шведова записывается в следующем виде:

где первый член правой части есть скорость вязкого течения, а второй — скорость упругой деформации.
При o = const из (2.45) получается (2.44).

Поскольку (2.44) является частным случаем выражения (2.45), то тело, которое подчиняется закону деформирования (2.44) принято называть телом Шведова—Бингама. Частным случаем этого тела является идеально вязкая жидкость Ньютона.
Закон релаксации напряжений в теле Шведова—Бингама имеет следующий вид:

При равенстве нулю предела текучести (oyp = 0), соотношения (2.45) и (2.46) Ф.Н. Шведова соответственно совпадают с уравнениями (2.42) и (2.43) Максвелла. Согласно соотношению (2.46) при t —> 00 напряжение снижается не до нуля, а до величины аур.
Уравнения состояния всех рассмотренных выше идеальных линейно-деформируемых тел в наиболее общем виде можно представить следующим образом:

где т и п — конечные целые числа; аn и bn — коэффициенты.
Рассмотренные выше уравнения состояния отображают приближенно поведение реальных материалов, они не соответствуют ни одному реальному телу. Кривые скоростей деформирования реальных тел при постоянной нагрузке асимптотически стремятся к координатным осям de/dt и t, однако ни один из законов линейного деформирования, заданных в дифференциальной форме, не удовлетворяет этому условию.
Для получения уравнения состояний более сложных тел в настоящее время созданы многочисленные реологические модели, которые приводят к очень сложным дифференциальным уравнениям. Н.В. Михайлов и П.А. Ребиндер еще в 1955 г. указывали, что применение все более сложных моделей является бессмысленным, так как они уводят все дальше от молекулярного механизма деформации реальных тел. Отмечая большое увеличение некоторых специалистов реологическими моделями, Ю.Н. Работнов (1966 г.) справедливо пишет, что «всякая модель такого рода является лишь аналогией, но не средством объяснения явления». С подобными мнениями о создании новых, все более сложных, реологических моделей и о реологических моделях вообще нельзя не согласиться.
Теория Л. Больцмана использует опыт ряда авторов, а также принимает существование линейной связи между напряжениями и деформациями. В 1874 г. Л. Больцман предложил теорию, описывающую наследственные деформации ползучести с помощью интегральных уравнений с переменным верхним пределом. Эта теория получила дальнейшее развитие в работах В. Вольтерра, опубликованных в 1897—1913 гг.
Согласно Л. Больцману, напряжение в упругом теле зависит не только от деформаций, полученных в данный момент времени, но и от предшествующей истории деформирования. Точно так же деформация упругого тела зависит не только от напряжений, полученных в данный момент времени, но и от предшествующей истории загружения. Вводя понятие о «функции ползучести» K(t—v), определяющей скорость ползучести тела от единичной нагрузки, приложенной в момент времени t=0, и суммируя приращения деформаций (вызванные приращениями напряжений) на основе закона наложения, получим уравнение состояния упругоползучего материала в виде следующего интегрального уравнения:

где o — напряжение, E — модуль упругости, v — момент приложения нагрузки, t — время, для которого определяется деформация.
Выражение (2.48) является частным случаем линейного интегрального уравнения с переменным верхним пределом В, Вольтерра второго рода, в котором ядро (функция ползучести) К является функцией не разности аргументов (t—v), а их произвольной функцией K(t, v). Уравнение В. Вольтерра, в отличие от (2.48), не инвариантно относительно начала отсчета времени. В связи с изложенным выше эта теория обычно называется теорией ползучести Больцмана—Вольтерра.
Из решения (2.48) относительно o получается:

В уравнениях (2.48) и (2.49) первые члены правых частей отображают мгновенную деформацию и начальное напряжение тела, а вторые — ползучесть и изменение напряжения во времени. При постоянном напряжении oo = const и деформации e0 = const уравнения (2.48) и (2.49) перепишутся в следующем виде:

Из уравнений следует, что в процессе деформирования наблюдается изменение свойств материала. Действительно, из (2.51) имеем:

Дифференцируя уравнение (2.50) и (2.51) пo t и принимая, что o0 = 1 и e0 = 1, получим:

т. e. ядро интегрального уравнения K(t—v) и его резольвента R(t—v) представляют собой скорости изменения ползучести и напряжения при о0 = 1 и e0 = 1. Следовательно, эти функции определяются испытанием образцов при постоянном напряжении o0 = 1 и постоянной деформации e0 = 1.
Уравнения (2.48) и (2.49) обобщают все уравнения состояния, заданные в дифференциальной форме. В зависимости от вида функций ползучести К(t—v) и релаксации напряжения R(t—v) из указанных соотношений можно получить законы деформирования ньютоновского, максвеллова тела, тела Кельвина—Фохта, Гогенемзера — Прагера и т. д. При (t—v)=0 уравнение (2.48) переходит в закон Гука.
В своих исследованиях Л. Больцман функцию ползучести представил как

где (t—v) — длительность загружения, А — параметр, определяемый из опыта.
Подобные новости- Колокольчик разнолистный
- Ползучесть и релаксация напряжений
- Напряженное состояние призматического элемента при двустороннем сжатии
- Кручение
- Чистый сдвиг
- Трехосное сжатие (растяжение)
- Сжатие (растяжение)
- Основные направления экспериментальной реологии глинистых грунтов
- Аварии сооружений вследствие ползучести глинистых грунтов
- Длительные деформации сооружений вследствие ползучести глинистых грунтов