 Навигация по сайту
Навигация по сайту Статьи о ремонте
Статьи о ремонте

Кинематика дробящих конусов
Общий вид современной конусной дробилки для первой стадии дробления показан на рис. 1. Эксцентрик 1 дробилки получает вращение от конической передачи 2 и приводного вала 3. Приводной вал дробилки соединен с приводным электродвигателем муфтой или ременной передачей: плоской для малых и клиновой для мощных дробилок. Оси внутренней и наружной цилиндрической расточки эксцентрика пересекаются в точке О, называемой точкой подвеса. Вал 4 подвижного дробящего конуса 5, который в дальнейшем будет называться подвижный конус, входит во внутреннюю расточку эксцентрика. При вращении эксцентрика ось подвижного конуса будет описывать коническую поверхность, ось которой совпадает с осью дробилки, а вершина — с точкой подвеса.
Конструктивно опоры подвижного конуса выполняются таким образом, что подвижный конус имеет возможность вращаться вокруг собственной оси.
При работе дробилки вхолостую силы трения, возникающие во внутренней расточке эксцентрика, способствуют увлечению подвижного конуса во вращение; силы трения в верхнем подвесе препятствуют вращению конуса относительно собственной оси. Следовательно, характер движения подвижного конуса при работе дробилки вхолостую определяется соотношениями сил трения в верхнем подвесе и внутренней расточке эксцентрика.

При дроблении между неподвижным и подвижным дробящими конусами зажимаются куски дробимого материала. Силы трения между зажатыми кусками материала и дробящими конусами значительно превосходят силы трения, возникающие при дроблении в верхнем подвесе и эксцентрике. Поэтому при дроблении подвижный конус тормозится силами трения и получает дополнительное вращение вокруг своей оси в сторону, противоположную вращению эксцентрика. Таким образом, конус при работе совершает сложное вращательное движение: переносное, т. е. вращение своей оси относительно оси дробилки, и собственное, т. е. вращение относительно собственной оси. Пренебрегая зазорами в эксцентриковом узле и верхнем подвесе, можно считать, что угол между осями подвижного конуса и дробилки остается постоянным. Такое движение тела называется регулярной прецессией и подробно разобрано в технической литературе.
В конусных гирационных дробилках других конструкций кинематика подвижного конуса остается без изменений и поэтому приводимые ниже расчетные формулы кинематических параметров дробящих конусов, инерционных сил конусов и эксцентриков применимы для всех конструкций конусных гирационных дробилок.
Любое движение твердого тела можно представить как вращение вокруг мгновенной оси. Так как вектор мгновенной скорости вращения подвижного конуса вокруг мгновенной оси движения является геометрической суммой переносного и собственного вращения, то он должен лежать в плоскости векторов переносного и собственного вращения, направленных по осям дробилки и подвижного конуса, и совпадать с мгновенной осью движения.
При установившемся движении подвижного конуса, т. е. при постоянной скорости эксцентрика и постоянных соотношениях сил трения в эксцентриковом узле и верхнем подвесе, вектор мгновенной скорости вращения и мгновенная ось вращения подвижного конуса будут описывать коническую поверхность с вершиной в точке подвеса.
Математическая взаимосвязь угловой скорости переносного вращения подвижного конуса ?1 и угловой скорости вращения подвижного конуса относительно собственной оси ?2 с мгновенной угловой скоростью вращения относительно мгновенной оси вращения со может быть установлена на основании уравнений проекций векторов этих скоростей на произвольные оси, так как эти вектора образуют замкнутый треугольник:

где ? — угол между осями дробилки и подвижного конуса;
? — угол между осью дробилки и мгновенной осью вращения подвижного конуса (рис. 2).
Заметим, что угловая скорость переносного движения подвижного конуса равна угловой скорости эксцентрика, что непосредственно следует из кинематической схемы дробилки (рис. 1).

Совместное решение системы уравнений (1) с исключением параметра ?2 дает возможность выразить мгновенную угловую скорость вращения подвижного конуса со через скорость переносного вращения подвижного конуса, угол ?, постоянный для дробилки, и угол ?, характеризующий положение мгновенной оси вращения подвижного конуса относительно оси дробилки:

Минимальное значение угла ? определяется профилем дробящего пространства. В первом приближении можно принять, что при дроблении происходит обкатывание подвижного дробящего конуса по неподвижному. В этом случае для дробилок крупного дробления обыкновенно ? = 10/25°; для дробилок среднего и мелкого дробления ? = 40/55°.
Максимальное значение угла ? определяется степенью увлечения подвижного конуса во вращение эксцентриком и зависит от конструктивного исполнения и состояния опор подвижного конуса. В дробилках с обычным коническим верхним подвесом (подробнее см. ниже) увлечение подвижного конуса эксцентриком практически отсутствует, т. е. ?вых — 90°. В дробилках со сферической опорой подвижного конуса (дробилки типа Саймонс) допустимое вращение конуса относительно собственной оси при работе на холостом ходу обыкновенно задается техническими условиями на поставку дробилки и составляет (10—15%) ?1. Угол ? при этом равен 160—170° (? = 2°).

На рис. 3 показаны графики мгновенной угловой скорости ?1 как функции угла ? при двух значениях угла ?: 30' и 2°. Эти значения ? наиболее часто применяются соответственно в дробилках крупного и среднего или мелкого дробления.
Таким образом, передаточное число эксцентрика в процессе изменения режима работы дробилки также имеет переменное значение и в общем виде выражается равенством

в котором мгновенная скорость вращения со определяется системой уравнений (1).
Рассмотрим кинематические зависимости взаимного движения дробящих конусов: скорости и пути встречи, которые определяют интенсивность деформации дробимого материала.
В дробилках с крутым профилем дробящего пространства и углом захвата, близким к предельному (22—26°), очевидно, правильно учитывать в первую очередь проекции пути и скорости встречи дробящих конусов на горизонтальную плоскость, пренебрегая составляющими пути и скорости встречи на вертикальную плоскость. В дробилках с пологим профилем дробящего пространства и малым углом захвата более важными оказываются проекции пути и скорости встречи дробящих конусов на плоскость, нормальную к профилю подвижного конуса. При этом можно пренебречь составляющими пути и скорости встречи дробящих конусов, касательными к профилю подвижного конуса. Под скоростью встречи конусов v?, будем в дальнейшем понимать составляющую скорости точки рабочей поверхности подвижного конуса v? на радиус AB (рис. 4); касательная составляющая скорость v?'' является скоростью проскальзывания подвижного конуса относительно дробимого материала.
Схемы проекций траекторий точки подвижных конусов с пологим (b) и крутым (а) профилями дробящего пространства, а также разложение скорости точки подвижного конуса v? на скорость встречи v?' и скорость проскальзывания v?'' изображены на рис. 4.

Мгновенную скорость вращения подвижного конуса со можно разложить на две составляющие: вдоль оси подвижного конуса ?np и нормальную к ней ?dp (рис. 5).
Нетрудно видеть, что скорость ?dp при постоянной угловой скорости переносного вращения ?1 и произвольных соотношениях угловых скоростей собственного и переносного вращения подвижного конуса — остается постоянной:

Составляющая мгновенной скорости вращения подвижного конуса на его ось (рис. 5)

Для большинства конусных дробилок и расчетных режимов можно без заметной погрешности принимать ?—? = ?, так как у конусных дробилок крупного дробления обыкновенно угол у принимается равным 20'—30', а угол ? ? 15°; для конусных дробилок среднего и мелкого дробления ? = 2/2,5°, а ? ? 45°.
Разложение всех угловых скоростей и сами угловые скорости (?1, ?2, ?, ?dp и ?np) производилось в плоскости осей дробилки и подвижного конуса. Ось подвижного конуса вращается вокруг оси дробилки с угловой скоростью ?1, поэтому и векторы мгновенной угловой скорости подвижного конуса со и составляющие его (?dp и ?np) также вращаются с угловой скоростью ?1 относительно оси дробилки.

Наиболее просто траекторию движения произвольной точки рабочей поверхности подвижного конуса можно выразить для случая, когда составляющая мгновенной скорости вращения подвижного конуса на ось его ?np равна нулю и подвижный конус совершает движение с мгновенной угловой скоростью ? = ?dp. Будем называть такое движение подвижного конуса круговым качанием.
Абсолютная скорость произвольно выбранной точки рабочей поверхности подвижного конуса при круговом качании (?np = 0) в соответствии с принятой схемой (см. рис. 2) может быть определена как произведение абсолютной мгновенной угловой скорости вращения подвижного конуса (|?| = |?dp| = ?1 sin ?) на расстояние от рассматриваемой точки до мгновенной осн вращения подвижного конуса. Из геометрических соотношений рис. 2 и 6 следует, что расстояние от выбранной точки до мгновенной оси вращения подвижного конуса будет

где ?1 — угол, образованный осью подвижного конуса и прямой, проходящей через точку подвеса и точку, скорость которой определяется;
? — центральный угол окружности на поверхности подвижного конуса, на которой лежит выбранная точка; за начало отсчета угла а принята плоскость, в которой лежат оси дробилки и подвижного конуса.
Абсолютная скорость выбранной точки

Проекции скоростей всех точек рассматриваемой окружности на плоскость, перпендикулярную оси подвижного конуса, направлены в одну сторону и равны между собой, т. е.
va гор = ?1r sin? cos ?1.
так как косинус угла между вектором скорости v? и поперечной плоскостью

Если пренебречь зазорами в опорах подвижного конуса и деформацией их, то траектория произвольной точки подвижного конуса лежит на сферической поверхности, центр которой совпадает с точкой подвеса. С некоторой условностью можно принять, что эта траектория при круговом качании лежит также и в плоскости, наклоненной к горизонтальной плоскости под углом ?1, что очевидно из схемы предельных положений подвижного конуса (рис. 7). Величина несовпадения точек траектории с этой плоскостью при круговом качании зависит от величины ?1 и не превышает r (1 — cos ?) (рис. 7). При принимаемых в дробилках углах у менее 2,5° такое допущение совершенно не существенно.

За начало координат угла a принималась плоскость, в которой лежат оси дробилки и подвижного конуса. Эта плоскость при работе вращается вокруг оси дробилки с угловой скоростью переносного вращения ?1. Если подвижный конус остановить, то для нахождения положения вектора скорости выбранной нами точки необходимо ее двигать по контуру окружности с угловой скоростью ?1. Следовательно, вектор проекции скорости нашей точки на горизонтальную плоскость в процессе кругового качания подвижного конуса остается постоянным по величине, равной ?1r sin? cos?1, и вращается вокруг центра траектории точки с угловой скоростью d?/dt = ?1 (существование центра траектории и симметричность ее очевидна вследствие периодичности самого движения, которое возможно рассматривать по фазам). Проекцией траектории точки на горизонтальную плоскость при этом будет окружность.
На рис. 8 показана схема траекторий нашей точки и проекции этой траектории на горизонтальную ось. Угол между плоскостями, в которых лежат эти траектории, равен ?1.
Из геометрических соотношений этой схемы следует, что тригонометрические зависимости между центральным углом ?' траектории точки и соответствующим центральным углом проекции траектории на горизонтальную ось а имеют вид:

Векторы абсолютных скоростей точки подвижного конуса, движущейся по траектории, лежат в плоскости этой траектории и направлены по касательной к ней. Для того чтобы определить составляющие этой скорости в направлении встречи с неподвижным дробящим конусом и скорость проскальзывания относительно дробимого материала, достаточно спроектировать абсолютную скорость v? на плоскость, в которой лежат оси дробилки и подвижного конуса, и перпендикулярную ей.
Угол отклонения вектора скорости v? от направления встречи дробящих конусов (вдоль большой оси траектории, которая является эллипсом, так как проекция ее на плоскость — окружность) может быть определен из геометрических соотношений (рис. 8, a и б):
Скорости встречи дробящих конусов и проскальзывания их относительно дробимого материала будут иметь следующие выражения:

Частные случаи скоростей встречи и проскальзывания соответственно:

Из уравнений (2) очевидно, что скорость встречи дробящих конусов не зависит от крутизны подвижного конуса (?1) и зависит при постоянном угле прецессии (?) от угловой скорости переносного вращения ?1 и удаления от точки подвеса (r). Скорость проскальзывания при круговом качании пропорциональна cos ?1 и поэтому у пологих дробящих конусов при прочих равных параметрах меньше, чем у крутых.
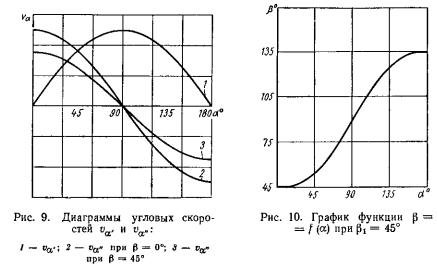
На рис. 9 показаны диаграммы скоростей встречи v?' и проскальзывания v?'' дробящих конусов при двух значениях угла р: 0° и 45°. Величины скорости даны в относительных единицах ?1r sin?.
Для случая некругового качания, когда ?dp и ?np ? 0, закон изменения скорости встречи дробящих конусов-остается без изменений, а скорость проскальзывания v?''? определяется алгебраическим суммированием скоростей от ?dp и ?np, так как линии действия векторов составляющих скоростей проскальзывания от этих вращений совпадают:

Вектор ?np может быть направлен в сторону вектора ?2 и против него. Направление вектора можно учитывать углом ?, т. е.

Приравнивая последнее равенство нулю, можно определить положение мгновенной оси вращения подвижного конуса (?) в функции положения точки на поверхности подвижного конуса, в которой скорость проскальзывания отсутствует. График такой функции для угла ?1 = 45° изображен на рис. 10.
Путь сближения дробящих конусов и траектория произвольной точки подвижного конуса могут быть получены интегрированием составляющих скорости v?' и v?''.
На рис. 11, а показана траектория точки подвижного конуса при круговом качании, в которой ось х совмещена с малой осью и ось у — с большой осью эллипса. Координаты х = f1(t) и y = f2(t) будут выражаться уравнениями:


Члены C1 и C2 в уравнениях координат пути являются постоянными интегрирования и определяются начальными условиями.
Постоянная интегрирования C1 в соответствии с начальными условиями (при ? = 0) равна нулю. При определении пути сближения дробящих конусов (координата у) удобней начало координат угла a принимать в момент максимального раскрытия разгрузочной щели. Тогда координата сближения дробящих конусов выразится равенством

Форма траекторий точек рабочей поверхности подвижного конуса при двух значениях угла ?1 и круговом качании показана на рис. 11, а.

В общем случае при существовании угловых скоростей ?dp и ?np при постоянных геометрических размерах подвижного конуса траектория произвольной точки на подвижном конусе зависит от соотношений угловых скоростей ?np/?dp или, что то же самое, от угла ?. На рис. 11, б показаны траектории для трех значений угла ?1:
? = 135° — увлечение подвижного конуса во вращение силами трения в подвижной опоре его;
? = 90° — силы трения в неподвижной опоре подвижного конуса не позволяют вращаться ему вокруг собственной оси — происходит круговое качание;
? = 45° — силы трения дробимого материала тормозят движение подвижного конуса и он вращается вокруг своей оси в сторону, обратную переносному вращению.
При построении этих графиков угол принимался равным 45°.
Подобные новости- Стандартизация продукции из древесины
- Защита цементно-стружечных плит (ЦСП)
- Защита древесноволокнистых плит (ДВП)
- Защита фанеры
- Защита клееной древесины
- Контроль качества защитной обработки строительных материалов и конструкций
- Защита элементов деревянных строений от возгорания
- Особенности защиты строений окрашиванием фасадных поверхностей
- Защитная обработка деревянных конструкций на объектах строительства
- Технологические основы защитной обработки строительных лесоматериалов и конструкций